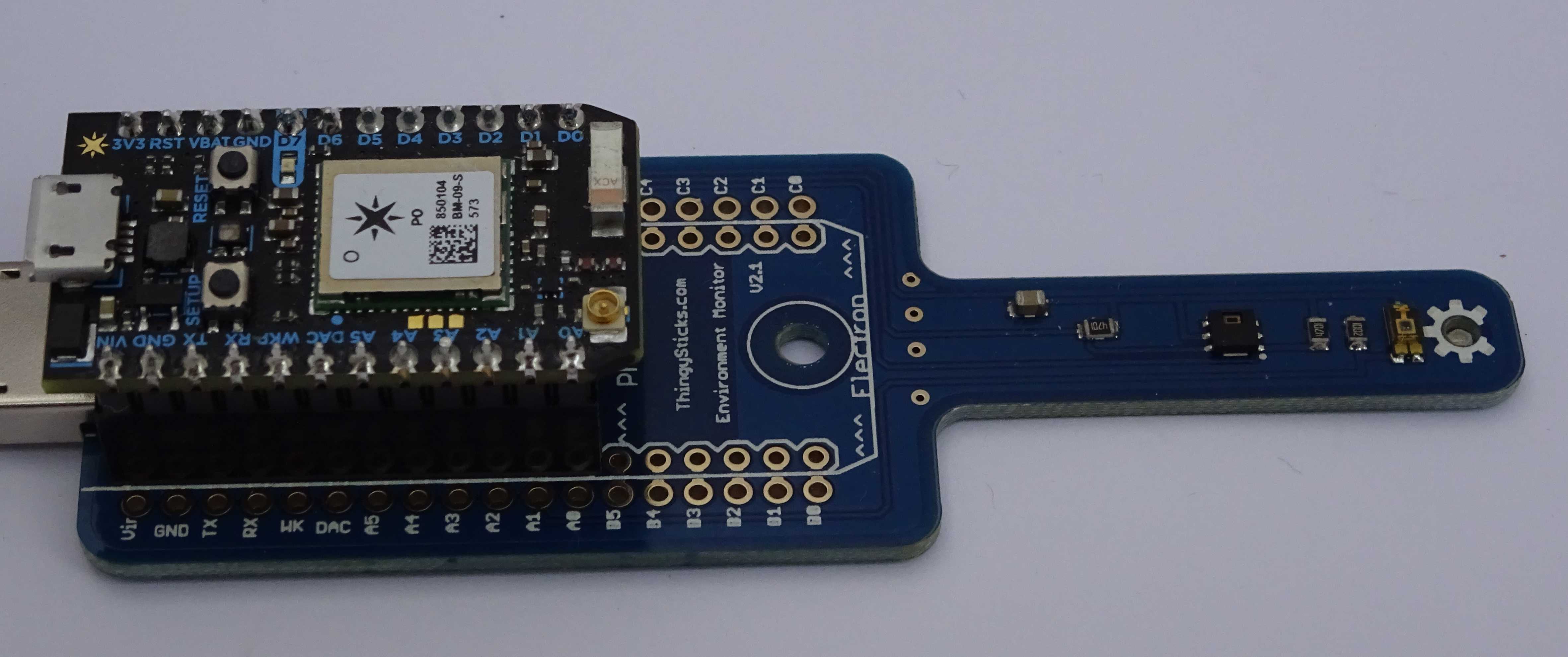


Features
- Ambient Light Sensor
- Temperature Sensor
- Humidity Sensor
- Barometric Pressure / Altitude Sensor
- LED indicator
- Can be plugged directly into a USB outlet
- Additional features can be added through the easy access holes next to the Photon/Electron.
- Headers can connect the stick onto the Particle Asset Tracker.
Sample Code
To use this sample code the BMP180 drivers need to be added to the Particle Build application. Click the (+) on the tabs and create a SFE_BMP180 tab (this will create the .c and .h tabs). Paste in the code from the files on Github.
You will also need to add the HTU21D driver library manually from the Particle Build console.
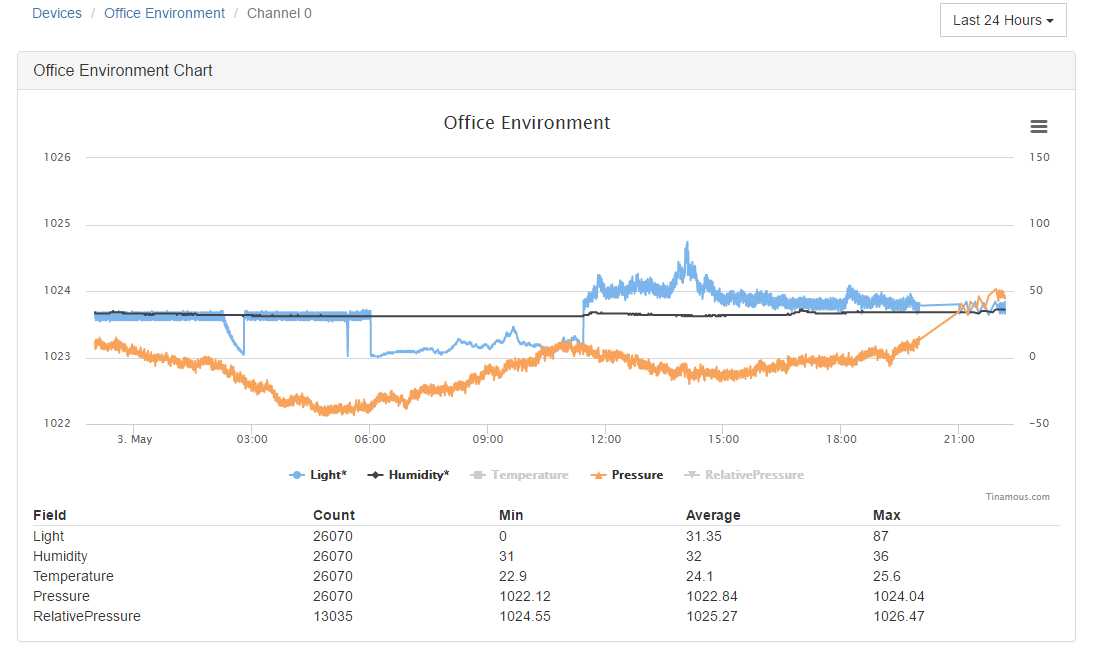
The below sample reads the light level, temperature, humidity and pressure every approximatly ever 10s, it creates a senml formatted message and publishes this to the Particle Cloud. You can then use a Tinamous Particle Bot to link your device and create graphs and notifications from the data.
// This #include statement was automatically added by the Particle IDE.
#include "HTU21D/HTU21D.h"
// This #include statement was automatically added by the Particle IDE.
#include "SFE_BMP180.h"
// Temperature and humidity
HTU21D humiditySensor;
// Pressure sensor. See: https://github.com/sparkfun/BMP180_Breakout_Arduino_Library
// Code to read the BMP180 is from the Sparkfun.com example.
SFE_BMP180 pressure;
bool hasPressureSensor = true;
// TEMT6000 analog input.
int lightSensorPin = A1;
// Output LED pin (onboard LED)
int ledPin = D7;
// Measured values.
int lightLevel = 0;
double humidity = 0;
double temperature = 0;
float measuredPressure = 0;
float relativePressure = 0;
// Set your altitude here.
// Cambridge, UK is between 6 and 20 meters above sea-level
float altitude = 13.0;
void setup() {
pinMode(lightSensorPin, INPUT);
pinMode(ledPin, OUTPUT);
if (!humiditySensor.begin()) {
// Publish a status message to indicate a fault.
// This can be picked up by Tinamous.com and will show on the timeline.
Particle.publish("status", "Humidity Sensor setup failed.");
}
if (!pressure.begin()) {
Particle.publish("status", "Could not find a valid BMP180 sensor.");
hasPressureSensor = false;
}
// Publish a status message to say we're online and the software version.
Particle.publish("Status", "Environment Sensor Online. V0.4.0");
}
void loop() {
// Indicate we are measuring.
digitalWrite(ledPin, HIGH);
readAndPublishMeasurements();
digitalWrite(ledPin, LOW);
sleep();
}
void sleep() {
// Sleep for 10 seconds before measuring again.
delay(10000);
}
// Publish the measured values as SENML format
// so that Tinamous knows how to parse it and
// record the data.
void readAndPublishMeasurements() {
String senml;
senml.reserve(250);
lightLevel = analogRead(lightSensorPin);
senml = "{'n':'Light','v':'" + String(lightLevel) + "'}";
// a value > 100 indicates a fault.
humidity = humiditySensor.readHumidity();
if (humidity < 100) {
senml += ",{'n':'Humidity','v':'" + String(humidity) + "'}";
}
// a value > 100 indicates a fault.
temperature = humiditySensor.readTemperature();
if (temperature < 100) {
senml += ",{'n':'Temperature','v':'" + String(temperature) + "'}";
}
if (hasPressureSensor) {
measuredPressure = readPressure();
if (measuredPressure > 0) {
senml += ",{'n':'Pressure','v':'" + String(measuredPressure) + "'}";
}
relativePressure = getRelativePressure(measuredPressure);
if (relativePressure > 0) {
senml += ",{'n':'RelativePressure','v':'" + String(relativePressure) + "'}";
}
}
Particle.publish("senml", "{e:[ " + senml + "]}", 600, PRIVATE);
// Small delay to ensure the measurements get sent before
// possible sleep.
delay(1000);
}
double readPressure() {
char status;
status = pressure.startTemperature();
if (status == 0)
{
Particle.publish("status", "error starting temperature measurement");
return 0;
}
// Wait for the measurement to complete:
delay(status);
// Retrieve the completed temperature measurement:
// Note that the measurement is stored in the variable T.
// Function returns 1 if successful, 0 if failure.
double T;
status = pressure.getTemperature(T);
if (status == 0)
{
Particle.publish("status", "error retrieving temperature measurement");
return 0;
}
// Start a pressure measurement:
// The parameter is the oversampling setting, from 0 to 3 (highest res, longest wait).
// If request is successful, the number of ms to wait is returned.
// If request is unsuccessful, 0 is returned.
status = pressure.startPressure(3);
if (status == 0)
{
Particle.publish("status", "error starting pressure measurement");
return 0;
}
// Wait for the measurement to complete:
delay(status);
// Retrieve the completed pressure measurement:
// Note that the measurement is stored in the variable P.
// Note also that the function requires the previous temperature measurement (T).
// (If temperature is stable, you can do one temperature measurement for a number of pressure measurements.)
// Function returns 1 if successful, 0 if failure.
double P;
status = pressure.getPressure(P,T);
if (status == 0)
{
Particle.publish("status", "error retrieving pressure measurement");
return 0;
}
// return absolute pressure.
return P;
}
double getRelativePressure(double P) {
// The pressure sensor returns abolute pressure, which varies with altitude.
// To remove the effects of altitude, use the sealevel function and your current altitude.
// This number is commonly used in weather reports.
// Parameters: P = absolute pressure in mb, ALTITUDE = current altitude in m.
// Result: p0 = sea-level compensated pressure in mb
// Store relative pressure in global variable.
return pressure.sealevel(P, altitude);
}
Schematic

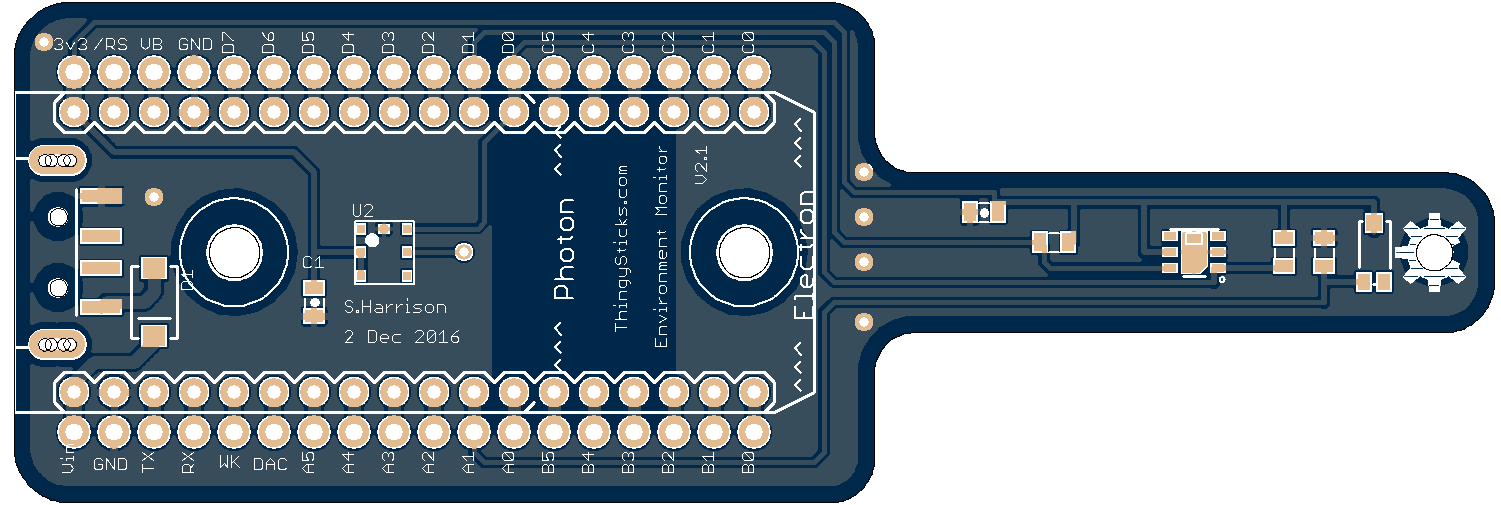
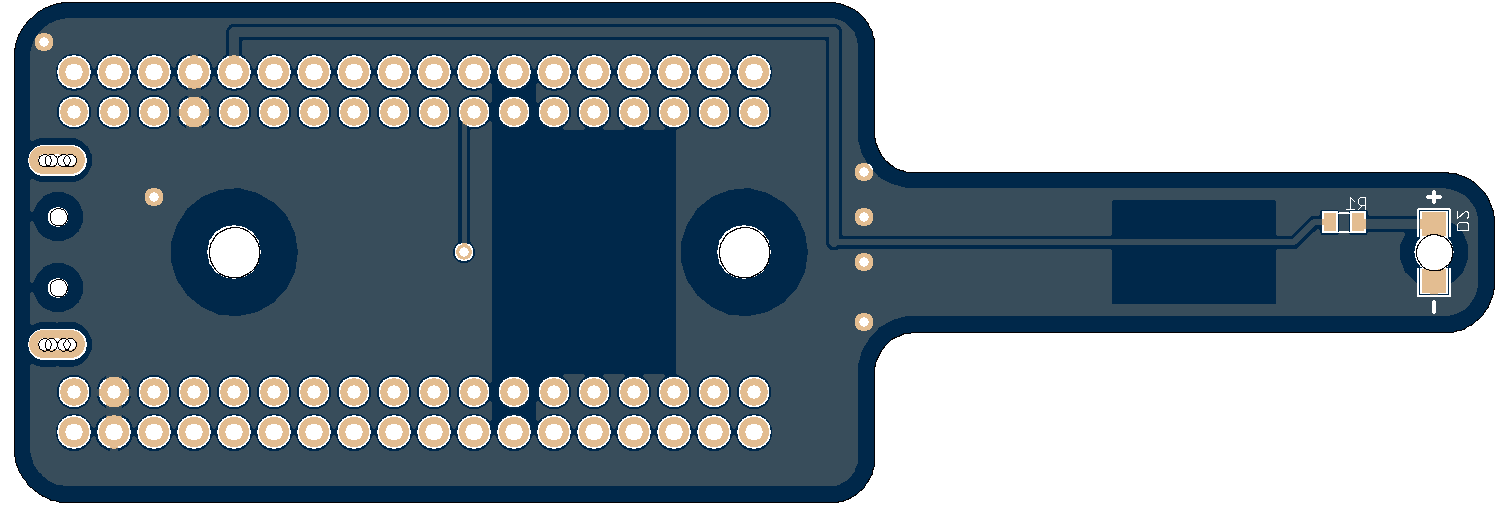
PCB Layout


Dimensions
- Length: 94mm
- Width: 32mm
- Tail Width: 10.2mm
- Hole 1: 3.2mm at 14,16
- Hole 2: 3.2mm at 46.5,16